|
I am research scientist at JP Morgan AI research working at the intersection of AI and Finance. Previously, I was a student at AIR Lab, SUNY Binghamton, working in the AIR lab focusing on knowledge-based robotics sequential decision making algorithms under the supervision of Shiqi Zhang. More specifically, I am interested in leveraging commonsense knowledge in POMDPs, Reinforcement Learning, uncertainty quantification, and combinatorial optimization. |

|
|
I'm interested in AI symbolic planning under uncertainty and Reinforcement Learning. Much of my research is about developing sequential decision making frameworks under partial observability. Representative papers are highlighted. |
|
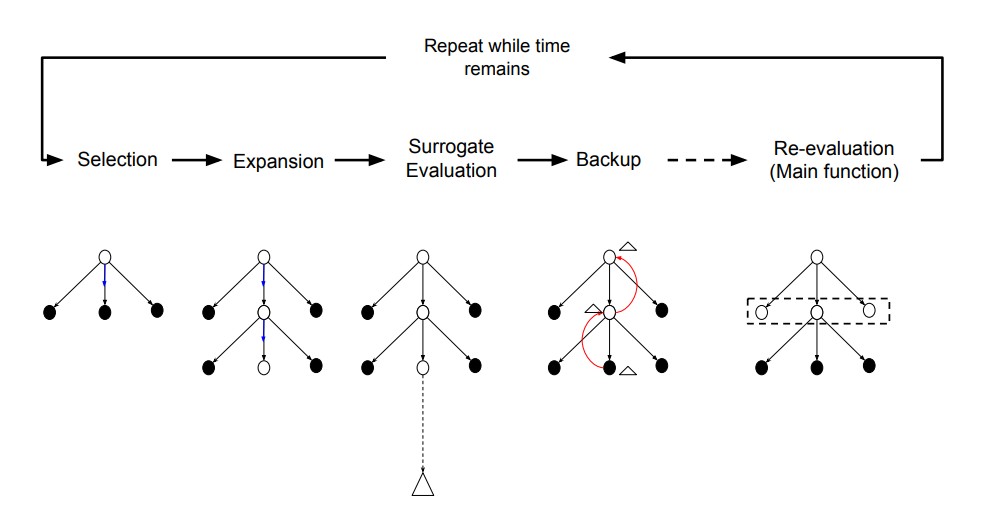
Saeid Amiri, Danial Dervovic, Michael Cashmore, SOCS, 2025 paper Using Surrogates to speedup MCTS in combinatorial optimization |
|
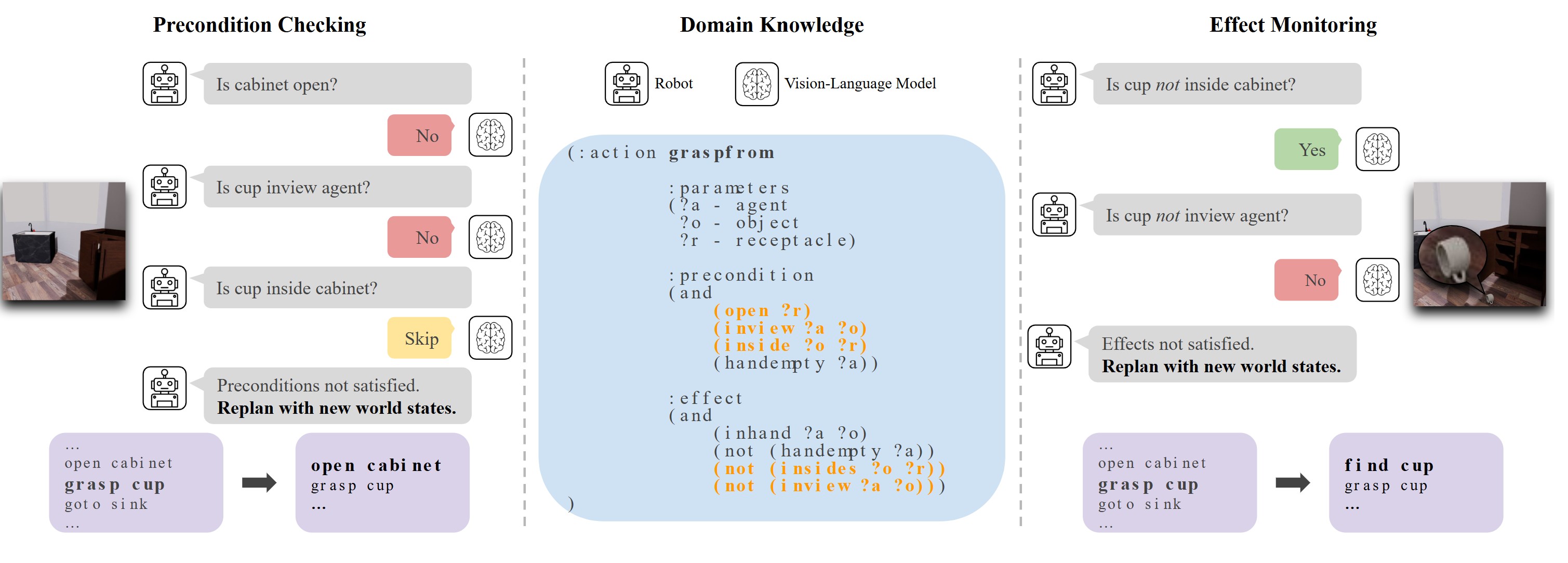
Xiaohan Zhang, Zainab Altawel, Yohei Hayamizu, Yan Ding, Saeid Amiri, Hao Yang, Andy Kaminski, Chad Esselink, Shiqi Zhang ICRA Workshop maybe , 2024 paper / webpage Vision-language models (VLMs) have been applied to robot task planning problems |
|
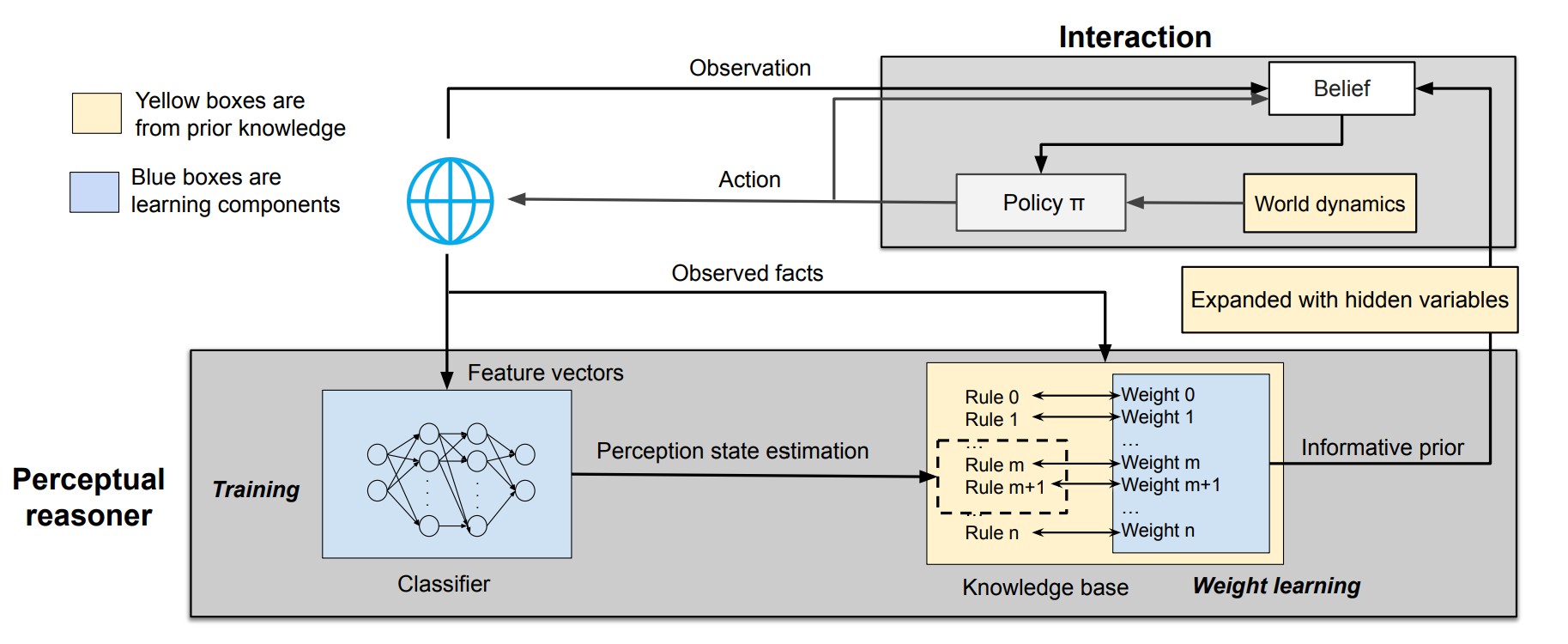
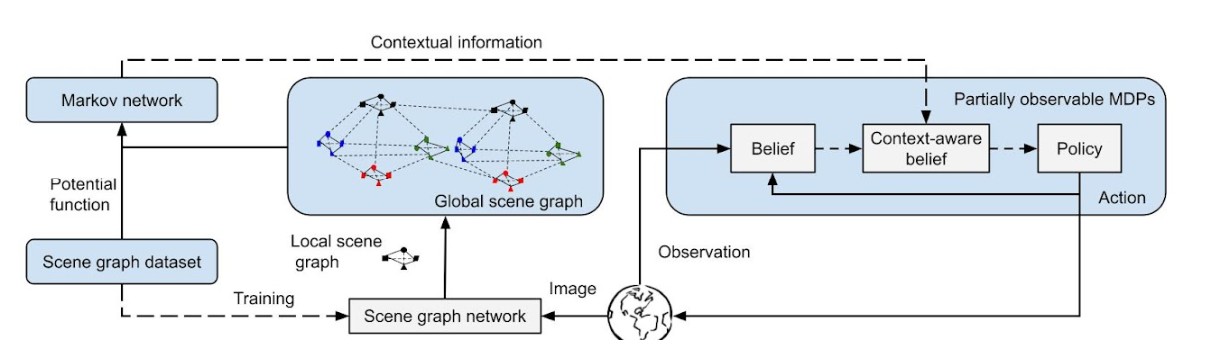
Cheng Cui, Saeid Amiri, Yan Ding, Xingyue Zhan, Shiqi Zhang UAI, 2023 paper / Video presentation / slides / poster Using supervised learning and automated reasoning to guide a POMDP-based symbolic planner |
|
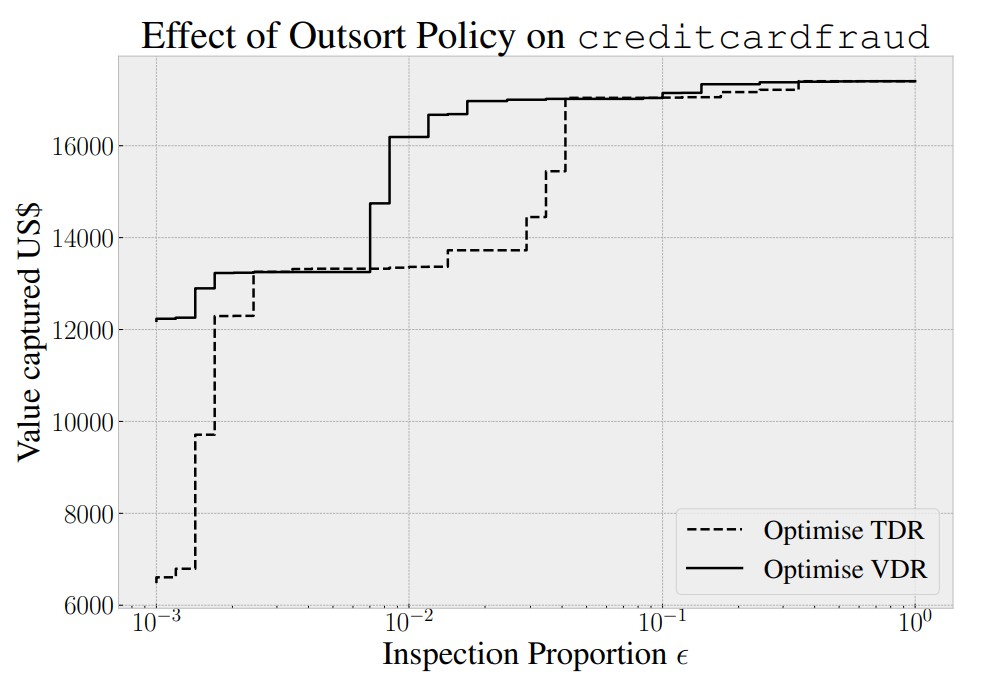
Danial Dervovic Saeid Amiri, Michael Cashmore ICAPS FinPlan , 2023 paper A metric for evaluating fraud detection system performance. |
|
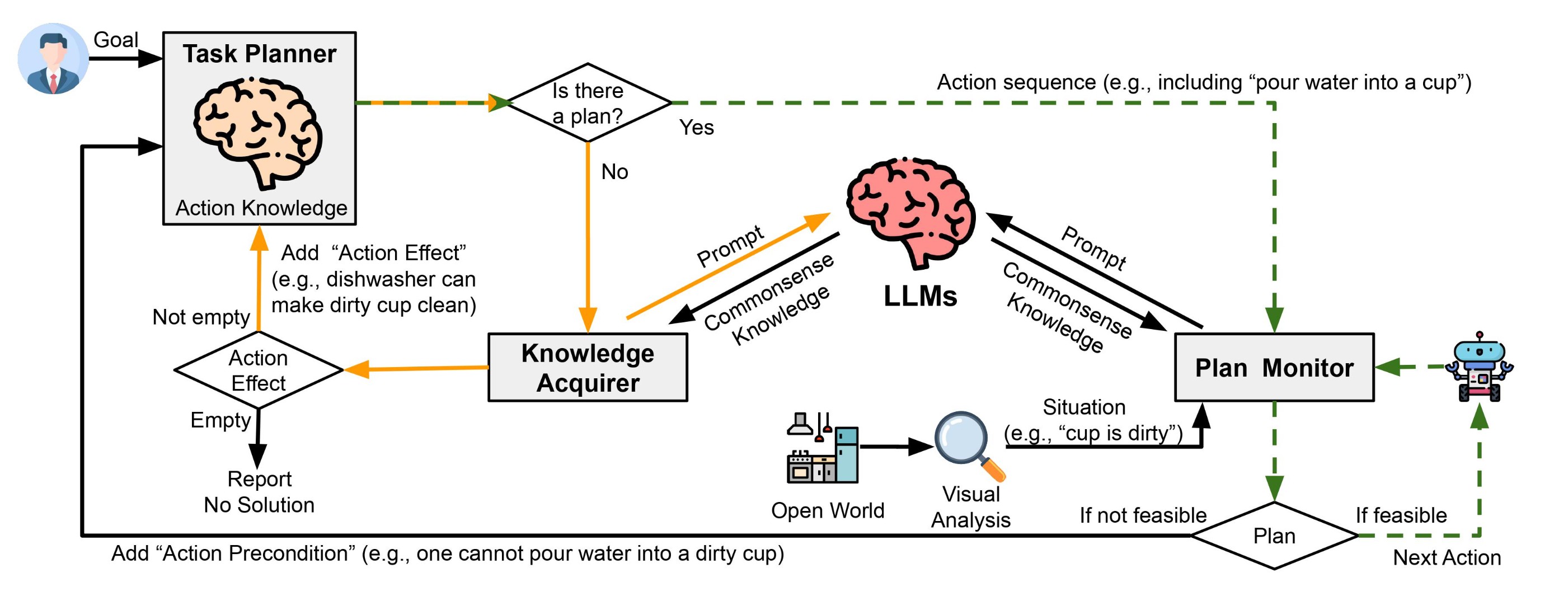
Yan Ding, Xiaohan Zhang, Saeid Amiri, Nieqing Cao, Hao Yang, Andy Kaminski, Chad Esselink, Shiqi Zhang Autonomous Robots Special Issue on Large Language Models in Robotics, 2023 paper / demo / webpage / code |
|
Saeid Amiri, Kishan Chandan, Shiqi Zhang ICRA, 2022 paper / demo / webpage / presentation / slides |
|
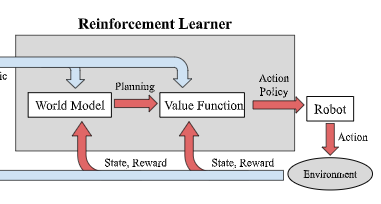
Yohei Hayamizuk, Saeid Amiri, Kishan Chandan, Seiki Takadama, Shiqi Zhang ICAPS, 2021 paper / demo / poster Using action knowledge to guide the model-based RL. |

|
Saeid Amiri, Mohammad S. Shirazi, Shiqi Zhang AAAI, 2020 (Oral Presentation) paper / demo / code / slides / poster Using supervised learning and automated reasoning to guide a POMDP-based symbolic planner |
|
|
Saeid Amiri, Sujay Bajracharya, Cihangir Goktolga, Jesse Thomason, Shiqi Zhang IROS, 2019 paper / arxiv / demo / code / slides / interview with Texplore A robotic dialogue system that simultaneously identifies human intention and augments its knowledge base. |
|
Saeid Amiri, Suhua Wei, Jesse Thomason, Jivko Sinapov, Shiqi Zhang, Peter Stone IJCAI, 2018 paper / slides / code / poster Leveraging Multi-Sensory data to guide a robot to identify object properties. |
|
|
|
|
JP Morgan AI Research, 2022 - Present Combinatorial Optimization |

|
ABB Robotics, 2020 Vision-based grasping using deep reinforcement learning |

|
Freshman Research Immersion program at SUNY Binghamton, 2020 & 2021 Course website Teaching First-year students AI and robotics and mentor them in their research projects. |
|
|
|
Program committee, AAAI-21, IJCAI-20, AAMAS-22, FLAIRS-22
Reviewer for ICRA-21 and IROS-20 |
|
|
|
|
|